Robottipurkaja
Tuotetiedot
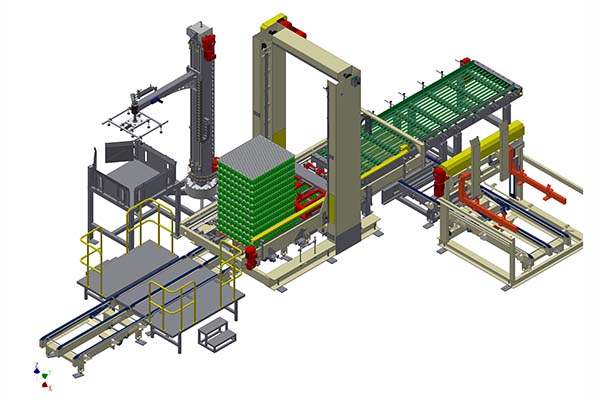
Tuotannon aikana koko tuotepino kuljetetaan ketjukuljettimella purkuasemalle, ja nostomekanismi nostaa koko lavan purkukorkeuteen. Tämän jälkeen välikerroksen imulaite poimii levyn ja asettaa sen levyvarastoon. Tämän jälkeen siirtopuristin siirtää koko tuotekerroksen kuljettimelle. Yllä olevat toimenpiteet toistetaan, kunnes koko lavan purku on valmis ja tyhjät lavat menevät lavankerääjälle.
Hakemus
Soveltuu laatikoiden, PET-pullojen, lasipullojen, tölkkien, muovitynnyreiden, rautatynnyreiden jne. automaattiseen purkamiseen.
Tuotenäyttö


3D-piirustus

Sähköinen kokoonpano
| Robottikäsivarsi | ABB/KUKA/FANUC |
| PLC | Siemens |
| Taajuusmuuttaja | Danfoss |
| Servomoottori | Elau-Siemens |
| Valosähköinen anturi | SAIRAS |
| Pneumaattiset komponentit | SMC |
| Kosketusnäyttö | Siemens |
| Matalajännitelaitteet | Schneider |
| Terminaali | Phoenix |
| Moottori | OMMELLA |
Tekninen parametri
| Malli | LI-RBD400 |
| Tuotantonopeus | 24000 pulloa/tunti 48000 korkkia/tunti 24000 pulloa/tunti |
| Virtalähde | 3 x 380 AC ±10 %, 50 Hz, 3 vaihetta + N + PE. |
Lisää videoesityksiä
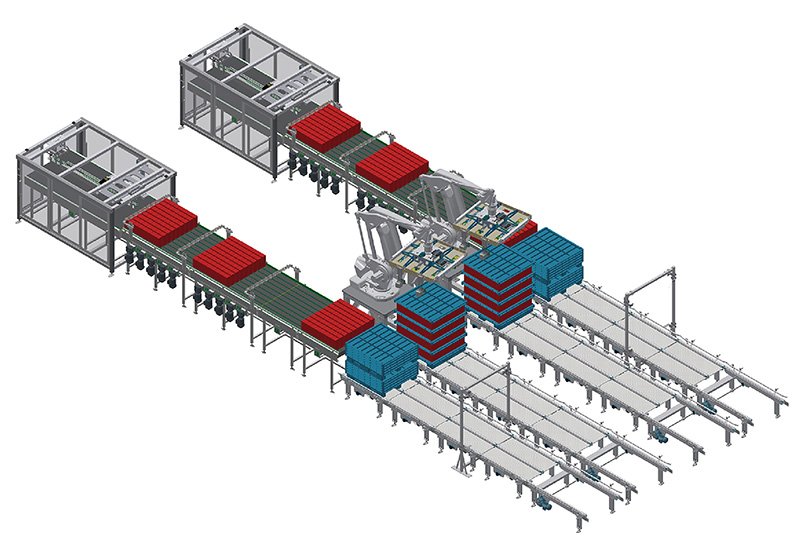
- Robottipullojen lavanpoistolaite jako- ja yhdistämislinjalla
- Robotti lavanpoistoon laatikoille, joissa on jako- ja yhdistämislinja